



规格参数
| 规格 | 参数 |
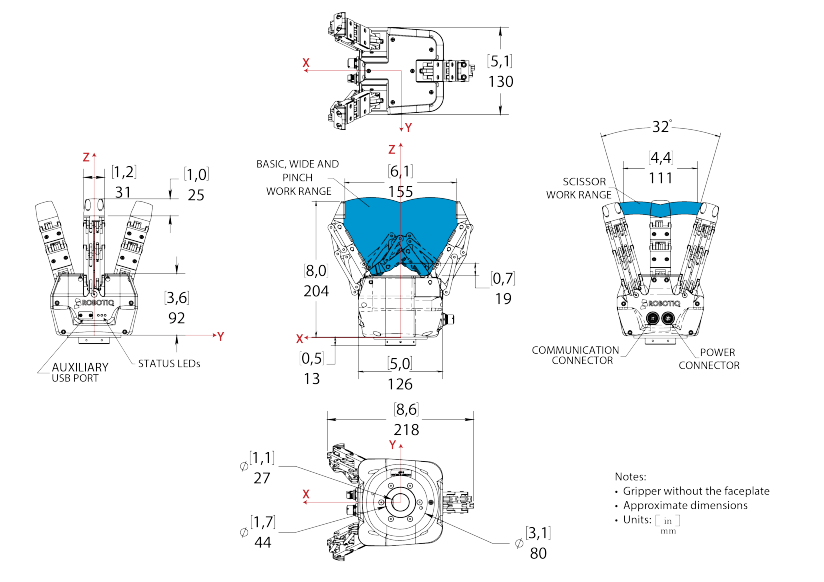
| 行程(可编程) | 155 mm |
| 夹力(可编程) | 30至70 N |
| 适形抓握载荷 | 10 kg |
| 摩擦抓握载荷 | 2.5 kg |
| 手指位置重复(指尖抓握) | 0.05 mm |
| 闭合速度(可编程) | 22至110 mm/s |
| 夹具质量 | 2.3 kg |
| 主要通信协议 | Modbus RTU (RS-485) |
| 次要通信协议选项 | Modbus TCP,EtherNet/IP,PROFINET,EtherCAT,DeviceNet,CANopen |
尺寸图:
应用场景





解决方案
显扬科技通过自主研发的高速高清三维机器视觉设备,以及智能工业机器人系统,联合多个知名机器人与机器人夹具企业,构建了一个机器人生态系统。显扬生态的产品能够完美的与显扬科技的机器视觉产品结合,包含通信协议、图形处理SDK、操作案例等。显扬科技是Robotiq夹具的的代理商,可以提供可靠、性价比高的产品。
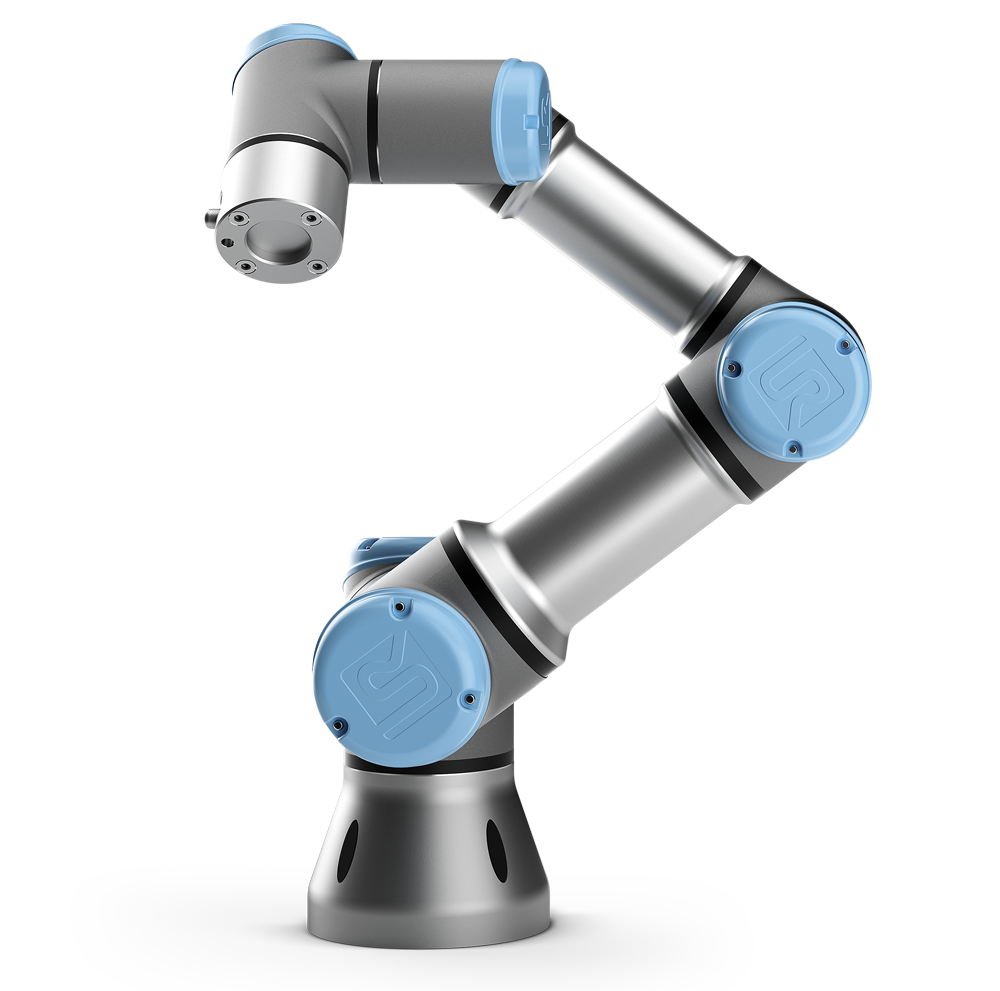
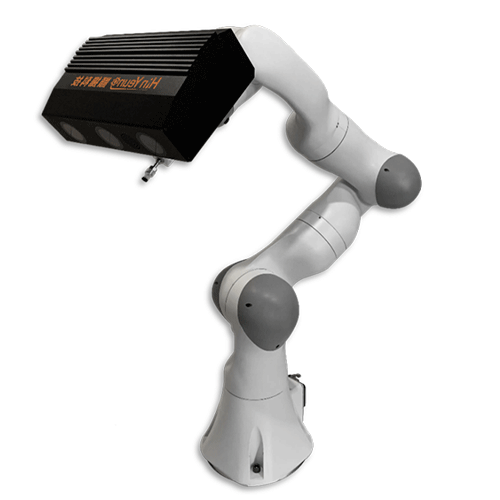
目前显扬科技生态系统包括以下品牌:UR,Franka,ABB,遨博,艾利特,伯朗特,Kuka等机器人公司,Robotiq,慧灵等机器人夹具企业,创想三维等3D打印企业。通过显扬生态,客户可以快速找到合适的机器人本体、夹具等,并快速部署基于显扬三维机器视觉产品的工业应用。
目前显扬科技生态系统包括以下品牌:UR,Franka,ABB,遨博,艾利特,伯朗特,Kuka等机器人公司,Robotiq,慧灵等机器人夹具企业,创想三维等3D打印企业。通过显扬生态,客户可以快速找到合适的机器人本体、夹具等,并快速部署基于显扬三维机器视觉产品的工业应用。

 Robotiq 3-Finger三指夹爪说明书
Robotiq 3-Finger三指夹爪说明书
